QQ
QQ
ABB机器人计算机无Console端口情况的诊断需求解析
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
ABB机器人在没有Console端口的情况下去做一些诊断。无论是喷涂机器人还是普通工业机器人,当碰到某些具体的问题时,需要现场工程师通过Console端口输入特定的一些命令来收集数据和诊断故障。
但是呢?从RobotWare6系统开始,主计算机Console端口不再是一个标配。很多用户都没有这个Console端口,那如何用串口命令呢?
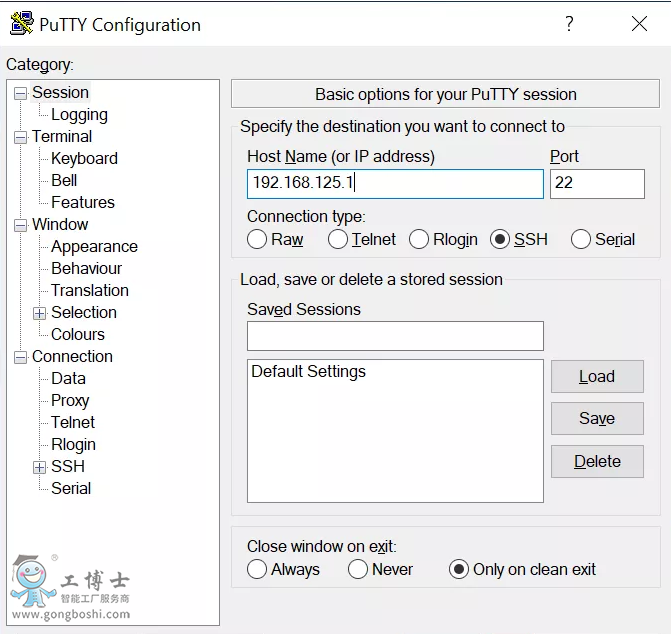
这里推荐一款软件“Putty”,这是一款开源免费的软件,直接网上搜就可以了。它可以支持SSH的方式连接主计算机,其连接协议提供了用途广泛的各种通道,可用于建立安全交互式会话外壳和转发(“隧道技术”)专有 TCP/IP 端口。换句话说,我们可以通过网口来发送串口命令。
我们来实践一下吧。将电脑连接控制柜服务端口,由于服务端口自带DHCP服务,所以电脑IP只需自动获取,直接插上就行。打开软件,
但是呢?从RobotWare6系统开始,主计算机Console端口不再是一个标配。很多用户都没有这个Console端口,那如何用串口命令呢?
这里推荐一款软件“Putty”,这是一款开源免费的软件,直接网上搜就可以了。它可以支持SSH的方式连接主计算机,其连接协议提供了用途广泛的各种通道,可用于建立安全交互式会话外壳和转发(“隧道技术”)专有 TCP/IP 端口。换句话说,我们可以通过网口来发送串口命令。
我们来实践一下吧。将电脑连接控制柜服务端口,由于服务端口自带DHCP服务,所以电脑IP只需自动获取,直接插上就行。打开软件,
点击“Open”,打开窗口,
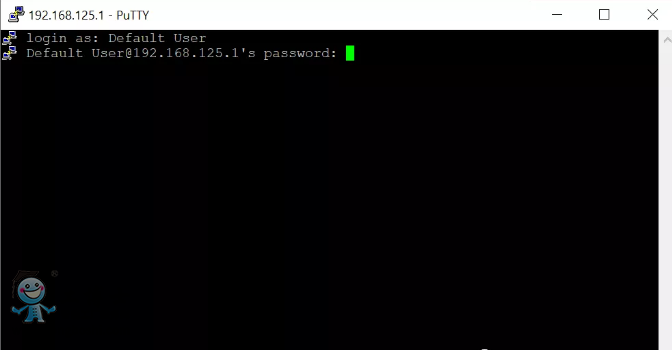
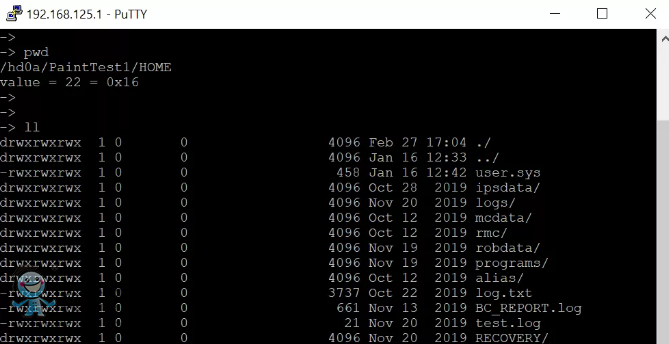
用户名密码输入“Default User”和“robotics”,然后回车后看到向右的小箭头就说明连接成功了!我们输入些测试命令试试,